
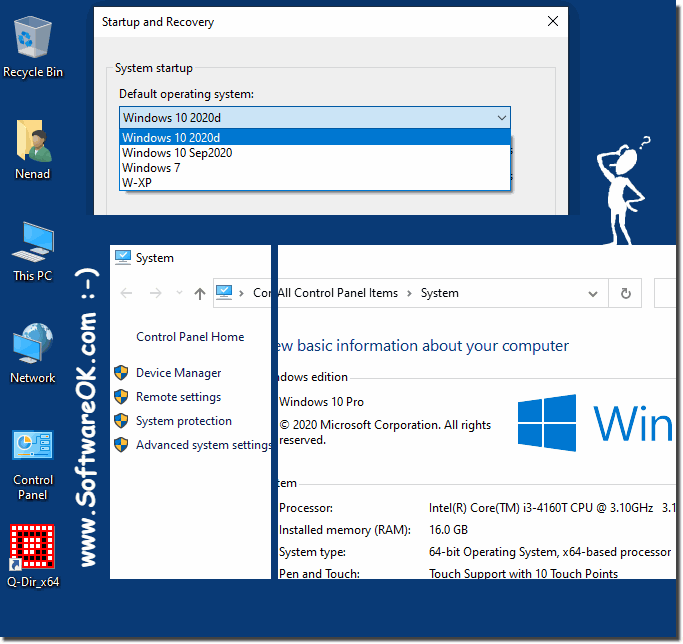
Starting Windows-10 takes 12 seconds on my test system: Intel i3-4160 240 GB SSD hard drive.
And shutdown 10 seconds.
It has to be said that this is a very cheap low cost PC.
Switching from Windows 10 to Windows 7 takes a total of 20 seconds!
Here Windows 10 is shut down and Windows 7 is started.
Just for information, it took 15 seconds when Win-XP started, but this is mainly due to the fact that there is no longer any driver maintenance.
On an old AMD 4200 X2 with a 640 GB SATA hard disk 24 seconds.
Starts Windows 10 in 24 seconds and shuts down in 21 seconds.
PS:
On SSD drives, changing hybrid hibernation settings in Windows 10, whether you activate or deactivate it, has little effect, in some cases it is even slower on some systems when activated. By far the most problematic setting when it comes to the startup time in Windows 10 is the quick start option. This is activated by default on the notebooks in the energy options; this is intended to shorten the start-up time by loading some start-up information before the PC is switched off, but it does not work on every device.
On SSD drives, changing hybrid hibernation settings in Windows 10, whether you activate or deactivate it, has little effect, in some cases it is even slower on some systems when activated. By far the most problematic setting when it comes to the startup time in Windows 10 is the quick start option. This is activated by default on the notebooks in the energy options; this is intended to shorten the start-up time by loading some start-up information before the PC is switched off, but it does not work on every device.
| (Image-1) Test PC starts from the Windows 10 operating system! |
 |
Info:
A computer that boots slowly, like no other troubleshooting problem, can test user patience, especially as boot times get longer and longer. Numerous attempts to correct the problem only help to add to a user's general frustration. Microsoft knows what users want. To increase the speed of startup and shutdown, Windows 10 uses a hybrid solution that puts the operating system kernel to sleep. In most cases, these hybrid systems work fine, but sometimes these hybrid systems can also slow down startup times for Windows 10 PCs.
A computer that boots slowly, like no other troubleshooting problem, can test user patience, especially as boot times get longer and longer. Numerous attempts to correct the problem only help to add to a user's general frustration. Microsoft knows what users want. To increase the speed of startup and shutdown, Windows 10 uses a hybrid solution that puts the operating system kernel to sleep. In most cases, these hybrid systems work fine, but sometimes these hybrid systems can also slow down startup times for Windows 10 PCs.